































MOSCOW, July 1 A program for the rapid and efficient recognition of defective parts and their removal from the conveyor by robotic manipulators was proposed by NCFU scientists as part of a research team. The results are presented at the IEEE 2024 Conference of Young Researchers in Electrical and Electronic Engineering.
As explained by specialists from the North Caucasus Federal University (NCFU), robotic manipulators ensure the quality of repetitive or fast operations, and are also indispensable in hazardous production conditions.
““We need a special algorithm so that the robot manipulator corrects its actions and learns itself during operation. For this, we use the machine learning process,” explained one of the authors of the study, associate professor of the department of control systems and information technologies of NKFU Karina Martirosyan.
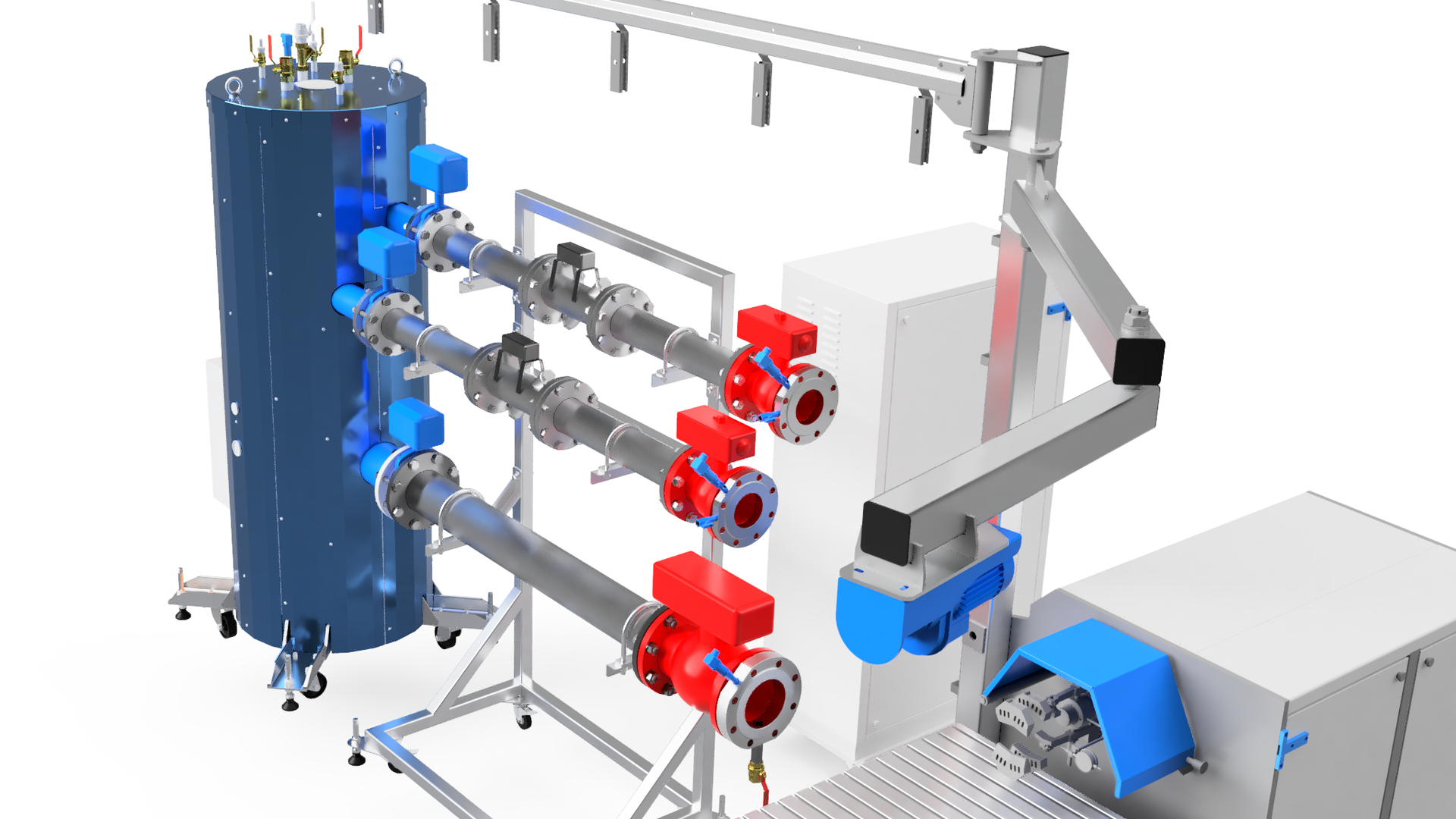
A team of scientists from NCFU and St. Petersburg Mining University has developed a program that helps a robotic manipulator recognize a part on a conveyor, determine its defect, and then quickly remove the part from the belt.
«The most difficult thing in such a task is to determine the time period allotted for these three operations. Next, it is necessary to ensure that the time allotted for processing one object is constant,” said Martirosyan.
According to her, to control robots, a platform is used that allows for interaction between computer vision systems and mechanics of the robot. When developing the algorithm, the Python programming language is used. In the future, scientists plan to expand the types of objects recognized by robotic manipulators.





















Свежие комментарии